偗偄偼傫側僕儏僯傾儘儃僢僩僋儔僽偼丄巕嫙偨偪偵乽儌僲偯偔傝乿偺妝偟傒偲乽壢妛媄弍乿傊偺嫽枴傪傕偭偰傕傜偆庢傝慻傒傪峴偭偰偄傑偡丅
TEL. 070-5349-1100
仹619-0237 嫗搒晎憡妝孲惛壺挰岝戜俉挌栚
Robot嫵嵽
亂 ROBOT嫵嵽丗斣奜曇 亃
丂丂丂 丂廬棃儘儃僢僩嫵堢梡偵偼丄幵宆偺帺棩宆儘儃僢僩傪嵦梡偟偰偄傑偟偨偑丄嶐擭搙枛偐傜KICK乮Keihanna Open Innovation Center @Kyoto乯偵帠柋強傪堏偟偨娭學偱
丂丂丂懡偔偺婇嬈丄尋媶婡娭丄抍懱偲偺岎棳偑偁傝丄偦偺拞偐傜摨幒偺僕僆儔儅嶌壠偝傫偲偺岎棳傕惗傑傟乽僕僆儔儅偲揝摴柾宆乿偲偄偆嫵堢嫵嵽偺敪憐偑惗傑傟傑偟偨丅
丂丂丂丂傕偲傕偲摨僕僆儔儅撪傪憱峴偡傞楍幵偼丄僨傿僕僞儖惂屼偝傟偨傕偺偱偡偑惂屼憰抲偑PLC乮僔乕働儞僒乕乯傪巊傢傟偰偄傞偺偱丄巹偨偪偑傛傝庤寉偵巊梡弌棃傞
丂丂丂儅僀僐儞惂屼偵抲偒姺偊傞帠傪峴偭偰偄偒傑偡丅
亂 壀杮揹巕偝傫偺尨宆僕僆儔儅 亃
丂丂丂丂偐傢偄偄恖宍丄壠 側偳偺桙偟偺晽宨偺拞傪丄嵟怴偺楍幵惂屼偝傟偨揹幵偑憱峴偟偰偄傞摦夋偱偡丅
丂丂丂偙偺條側偐傢偄偄僕僆儔儅傪惢嶌偡傞傕傛偟丄楍幵惂屼偺僾儘僌儔儉傪嶌傞傕傛偟偱柌偼傆偔傜傒傑偡丅
丂丂丂壒検偵拲堄偟偰偔偩偝偄丅
丂丂丂
丂丂丂
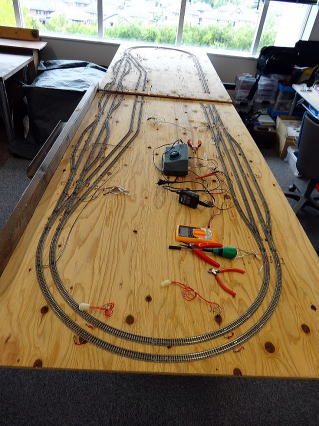
丂慄楬偺弨旛
丂丂丂丂壀杮偝傫偑埲慜僥僗僩偝傟偰偄偨慄楬偑桳偭偨偺偱丄僾儘僌儔儉僥僗僩梡偲偟偰庁梡偟惍旛傪偟偰偄傑偡丅乮嶦晽宨偱偡偑丄僥僗僩僐乕僗偲偟偰嵟崅偱偡丅乯
丂丂丂俀枃偺儀僯儎斅傪崌傢偣傞偲丄偆傑偔暯峴偑庢傟傑偣傫丅崅偝偼崌偭偰偄傑偡偑僱僕儗丄榗傒偑惗偠偰偄傞偺偱嫺惓偑昁梫偱偡丅傑偨崌懱偝偣傞偲偒儗乕儖偺偮側偓偱
丂丂丂栤戣偑弌傑偡丅偙偙偱挿偝挷惍梡偲偟偰僶儕傾僽儖儗乕儖傪巊梡偟傑偡丅

丂丂丂丂丂丂俈侽mm乣俋侽倣倣傑偱壜曄偡傞偙偲偑偱偒傑偡丅


丂丂丂丂丂丂丂忋婰偺抜嵎偑偁傞偲僕儑僀儞僩偑偱偒傑偣傫丅丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂忋壓偵曗嫮斅傪庢晅傑偡丅
丂丂丂丂儗乕儖忋偵楍幵偑偟偽傜偔憱偭偰偄側偄偲昞柺巁壔偑偼偠傑傝僗儉乕僗側惂屼偑弌棃側偔側傝傑偡丅忬懺偑埆偄強偱偼嵟戝揹埑傪壛偊偰傕慡偔憱峴偟傑偣傫丅
丂丂丂壗夞傕憱峴偝偣傞偐廮傜偐偄僥傿僢僔儏摍偱杹偔偲傛偔側傝傑偡丅偝傃偑弌偰偄傞晹暘偼栚偺嵶偐偄僒儞僪儁乕僷乕偱寉偔偙偡偭偰摫揹偡傞傛偆偵偟偰偔偩偝偄丅
丂丂丂儊乕僇乕偐傜偼丄愱梡儗乕儖僋儕乕僫乕傕斕攧偝傟偰偄傑偡丅乮彜昳柤丗LOCO乯丄堦斒偺徚撆塼偺僄僞僲乕儖偱傕戙懼偊壜擻偱偡丅丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂
丂丂丂壓婰偺摦夋偼挷惍搑拞偱丄傑偩堦晹僗儉乕僗側憱峴偑弌棃側偄偲偙傠偑巆偭偰偄傑偡丅
丂寶暔撪偺徠柧僐儞僩儘乕儖偺幚尡
丂丂丂丂寶暔撪偺徠柧偵偼LED傪巊梡偟傑偡偑丄楢懕揰摂偱偼柺敀偔側偄偺偱徠搙偵曄壔傪壛偊偨偄偲巚偄傑偡丅
丂丂丂崱夞偼丄媈帡侾乛倖梙傜偓偺揰摂惂屼傪峴偄傑偡丅乮幚嵺偵侾乛倖梙傜偓偵側偭偰偄傞偺偐偼媈栤偑巆傝傑偡丅乯
丂丂丂彮偟尒偵偔偄偱偡偑丄俁屄偺僇儔乕LED傪巊偭偰Arduino偐傜惂屼偟偰偄傑偡丅 丂徻嵶偼師儁乕僕偱岞奐
丂DC儌乕僞乕惂屼偺幚尡
丂丂丂丂DCC惂屼傪巒傔傞慜偵丄婎杮偲側傞DC惂屼傪妋擣偟偰傒傑偡丅
丂丂丂慜恑丄屻恑丄掆巭偺妋擣偱偡丅DC偺侽V偱掆巭丄亄侾俀V偱慜恑嵟崅懍丄亅侾俀V偱屻恑嵟懍搙偲側傝傑偡丅乮拞娫懍搙偼丄PWM惂屼乯
丂丂丂Arduino惂屼丄儌乕僞乕僪儔僀僶乕偼TI幮惢 DRV8835 儌乕僞乕嬱摦揹尮偼侾俀V偱巊梡
丂丂丂H宆惂屼偺儌乕僞乕椉抂攇宍偱PWM惂屼偲偟偰傎傏侾侽侽亾偱嬱摦偟偰偄傞偺偱DC摦嶌偵嬤偄攇宍偲側偭偰偄傑偡丅
丂丂丂徻嵶偼師儁乕僕偱岞奐偟偰偄傑偡丅