けいはんなジュニアロボットクラブは、子供たちに「モノづくり」の楽しみと「科学技術」への興味をもってもらう取り組みを行っています。
TEL. 070-5349-1100
〒619-0237 京都府相楽郡精華町光台8丁目
KINECT
【 KINECT 】高精度距離測定
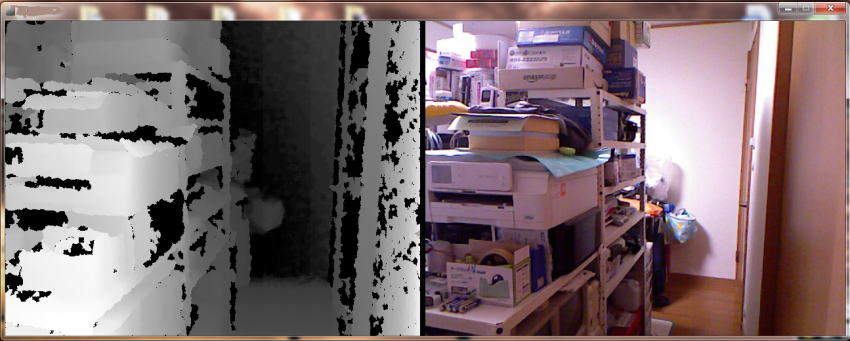
前回、距離ピクセル情報を見たとき、RGB各要素が同じ数値が返ってきました。これは、距離をグレースケール表現しているためでカラー情報を無くしているからです。
また、距離ピクセルの数値は、奥にあるものは黒色となっていて、「255」に近い数値、手前のものは白色で「0」に近い数値で表されています。
という事は、距離の表現能力は、0から255の256通りしかありませんが、KINECTの距離測定範囲は、50cmから7m強までとなっているので表現能力を拡大する必要
があります。( 0 mm 〜 8000 mm 必要 )
実際の KINECT の距離情報能力は、ピクセルあたり11ビットあり、数値表現としては、0〜2047ということになります。
従って、ここでは KINECT の持つ最大能力を使って実際の距離と KINECT で測定した距離との精度確認を行いたいと思います。
これは、ロボットに搭載して物体認識を行う上で重要です。
プログラム
import SimpleOpenNI.*; SimpleOpenNI kinect; void setup() { size(640, 480); kinect = new SimpleOpenNI(this); kinect.enableDepth(); } void draw() { kinect.update(); PImage depthImage = kinect.depthImage( ); image( depthImage, 0, 0); } void mousePressed( ){ int [] depthValues= kinect.depthMap(); int clickPosition = mouseX + ( mouseY * 640 ); int clickDepth = depthValues [ clickPosition ]; float inches = clickesDepth / 25.4; println( " inches: " + inches ); } |
プログラム解説( 機能追加部分のみ )
- depthMap 関数
- in 関数
実行結果
距離画像 カラー画像