けいはんなジュニアロボットクラブは、子供たちに「モノづくり」の楽しみと「科学技術」への興味をもってもらう取り組みを行っています。
TEL. 070-5349-1100
〒619-0237 京都府相楽郡精華町光台8丁目
KINECT
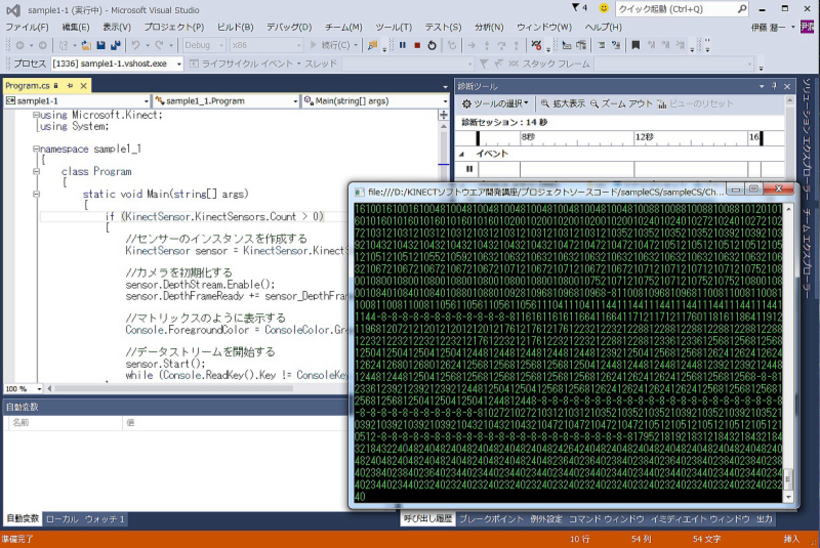
【 KINECT 】Depth Camera からの画像ビット列を、のぞき見してみる。
KINECT を操作するにあたり、まずは Depth Camera( 深度カメラ )から送られるデーターがどの様なものかを見てみましょう。
とは言っても高速に数値がスクロールされるだけですが、これが元となり表示されるデーターを加工していくことになります。
Visual Studio で、KINECT プロジェクトを作成
- 新しいプロジェクトを作成する。
- Microsoft.Kinect.dll を参照する。
- 適切な Kinect 名前空間を宣言する。
プログラム
アプリケーションの Program.cs ファイルの先頭に、Microsoft.Kinect 名前空間の宣言を追加する。
この名前空間は、NUI と オーディオ用のすべての Kinect 機能をカプセル化しています。
| using Microsoft.Kinect; |
カメラのデーターを使用する場合は、さらに KinectSensor オブジェクトのインスタンスを作成、初期化した上で開始する必要があります。
ここでは、深度カメラのビットストリームを表示するアプリケーションを作成しますが、KinectSensors 配列にカメラが1台しかない場合を想定しています。
DepthFrameReady イベントのイベントハンドラを追加し、「Space」キーが押されるまでアプリケーションが終了せずに待機するループを作成します。
最後に、アプリケーションを終了する直前に深度ストリームリーダーを無効にします。
| static void Main ( string[] args ) { // センサーのインスタンスを作成する。 KinectSensor sensor = KinectSensor.KinectSensors[0]; //カメラを初期化する。 sensor.DepthStream.Enable(); sensor.DepthFrameReady += sensor_DepthFrameReady; // マトリックスのように表示する。 Console.ForegroundColor = ConsoleColor.Green; // データストリームを開始する。 sensor.Start(); while ( Console.ReadKey().Key != ConsoleKey.Spaceber ){} } |
| static void sensor_DepthFrameReady ( object sender, DepthImageFrameReadyEventArgs
e ) { using ( var depthFrame = e.OpenDepthImageFrame ( ) ) { if ( depthFrame == null ) return; short[] bits = new short [ depthFrame.PixelDataLength ]; depthFrame.CopyPixelDataTo ( bits ); foreach ( var bit in bits ) Console.Write ( bit ); } } |
上記アプリケーションは、KINECTを使用する基本となります。
上記から得られるデータ( DepthFrameReady イベントで渡されるデータ )を使って色々なサンプルを作成していきます。
これ以外の有用なイベントがあります。
- DepthFrameReady イベント( 今回使用のもの )
- ColorFrameReady イベント
- SkeletonFrameReady イベント